Motion planning and search
Weighted A*, time-expanded pursuit, RRT, RRT-Connect, RRT*, PRM, Dijkstra-style graph search, and STRIPS-style task planning.
(he/him)
MS Robotics Student and Research Associate
MS Robotics
2024-08-01
2026-05-31
Carnegie Mellon University
BS Electrical Engineering
2017-09-01
2021-06-30
University of California, Los Angeles
Evidence-based skill map
Evidence-backed robotics, software, and hardware strengths drawn from the portfolio, resume, and author profile.
Weighted A*, time-expanded pursuit, RRT, RRT-Connect, RRT*, PRM, Dijkstra-style graph search, and STRIPS-style task planning.
Model Predictive Path Integral control, sampling-based MPC, whole-body locomotion costs, process-control timing, PID, and linear feedback coursework.
Simulation, planning analysis, visualization, manipulation assignments, MPPI work, and local developer tooling.
Search/planning implementations, embedded robot work, and robotics coursework projects.
Wheeled quadruped simulation tasks and controller evaluation.
Panda manipulation simulation, collision checking, point-cloud capture, and grasp attempts.
Wheeled quadruped model used for whole-body MPPI locomotion experiments.
IK, pick-and-place, grasp search, and force-closure coursework.
Robotics demo gallery
Project-linked videos and local demo media for robotics platforms, simulation, and planning work.
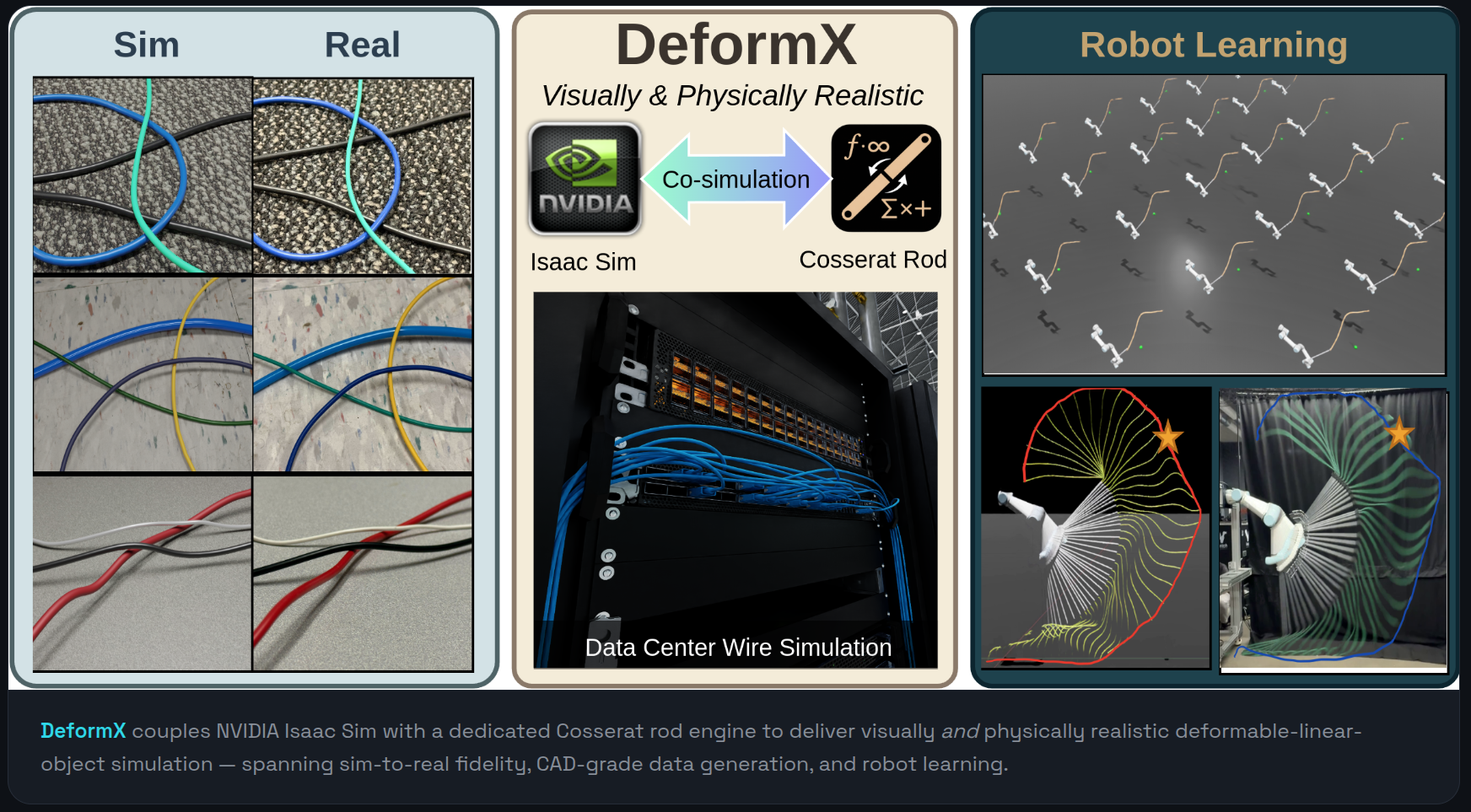
Co-simulation framework for deformable linear objects combining Cosserat rod physics with NVIDIA Isaac Sim, demonstrated by a sim-trained rope-swinging policy hitting targets on a UR5e manipulator.
Modular robot limb experiments connecting force sensing, full-limb behavior, and early neural-controller work on repeated robot modules.
Carriage-mounted space-arm testbed work for coordinated manipulation, sensing, and control on a physical robotics platform.
Whole-body MPPI controller for the Unitree Go2W in MuJoCo, with wheel-aware actions and rough-terrain simulation tasks.
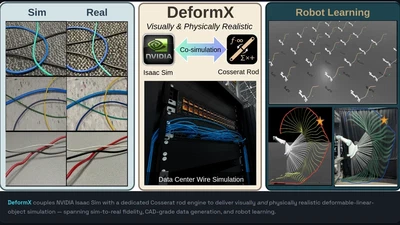
Co-simulation framework for deformable linear objects that combines Cosserat rod physics, NVIDIA Isaac Sim visualization, mesh skinning, and robot-learning workflows.

Confined-space pipe inspection robotics work with crawler hardware, mapping, and misalignment visualization.
In-progress process-control research for ultra-large-format additive manufacturing that adapts deposition timing to uncompensated vibrations.
Modular robot work involving force sensing, limb experiments, and preliminary neural controller results.
Space-arm robotics work using a carriage-mounted arm testbed for coordinated motion, sensing, and manipulation research.
A C++ robotics planner that uses weighted A* in a time-expanded grid to intercept a moving target while replanning from the robot's current state.
Python manipulation coursework in MEngines covering rigid-body transforms, forward kinematics, screw coordinates, contact mechanics, RRT-Connect planning, antipodal grasp search, …
Whole-body MPPI controller for the Unitree Go2W wheeled quadruped, extending legged locomotion control with wheel-torque actions, wheel-aware costs, and MuJoCo simulation tasks.
A local, usage-aware job queue for Claude Code that stages coding tasks, injects per-project agent context, and runs queued work near the end of a Claude.ai usage window.
C++ sampling-based motion planners for a high-DOF planar robot arm, comparing RRT, RRT-Connect, RRT*, and PRM on collision-free joint-space planning tasks.
A C++ STRIPS-style symbolic planner for grounding action schemas and searching over Blocks World, Blocks Triangle, and robot-fire-extinguisher planning domains.

{kind=link}