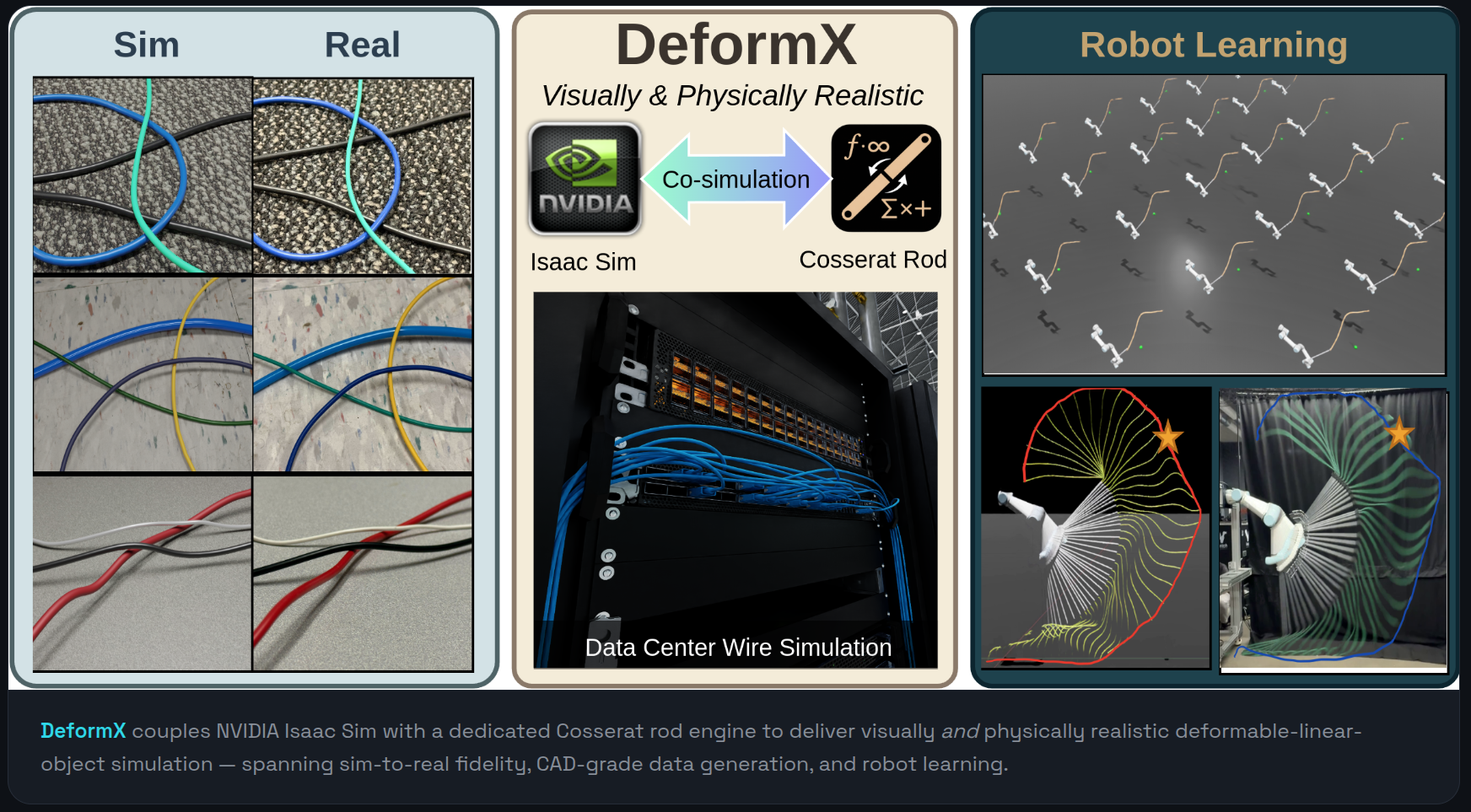
DeformX Rope-Swinging Trials
Co-simulation framework for deformable linear objects combining Cosserat rod physics with NVIDIA Isaac Sim, demonstrated by a sim-trained rope-swinging policy hitting targets on a UR5e manipulator.
deformable linear objects
Cosserat rods
Isaac Sim

{kind=link}
{kind=link}
{kind=link}
{kind=link}