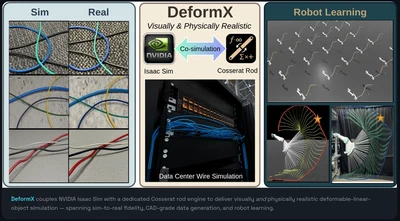
DeformX
Co-simulation framework for deformable linear objects that combines Cosserat rod physics, NVIDIA Isaac Sim visualization, mesh skinning, and robot-learning workflows.
Robotics, planning, automation, lab research, and course projects with source links, media, and technical summaries.
Co-simulation framework for deformable linear objects that combines Cosserat rod physics, NVIDIA Isaac Sim visualization, mesh skinning, and robot-learning workflows.
Confined-space pipe inspection robotics work with crawler hardware, mapping, and misalignment visualization.
In-progress process-control research for ultra-large-format additive manufacturing that adapts deposition timing to uncompensated vibrations.
Modular robot work involving force sensing, limb experiments, and preliminary neural controller results.
Space-arm robotics work using a carriage-mounted arm testbed for coordinated motion, sensing, and manipulation research.
A C++ robotics planner that uses weighted A* in a time-expanded grid to intercept a moving target while replanning from the robot's current state.
Python manipulation coursework in MEngines covering rigid-body transforms, forward kinematics, screw coordinates, contact mechanics, RRT-Connect planning, antipodal grasp search, …
Whole-body MPPI controller for the Unitree Go2W wheeled quadruped, extending legged locomotion control with wheel-torque actions, wheel-aware costs, and MuJoCo simulation tasks.
A local, usage-aware job queue for Claude Code that stages coding tasks, injects per-project agent context, and runs queued work near the end of a Claude.ai usage window.
C++ sampling-based motion planners for a high-DOF planar robot arm, comparing RRT, RRT-Connect, RRT*, and PRM on collision-free joint-space planning tasks.
A C++ STRIPS-style symbolic planner for grounding action schemas and searching over Blocks World, Blocks Triangle, and robot-fire-extinguisher planning domains.