DeformX
 DeformX co-simulation framework for deformable linear objects.
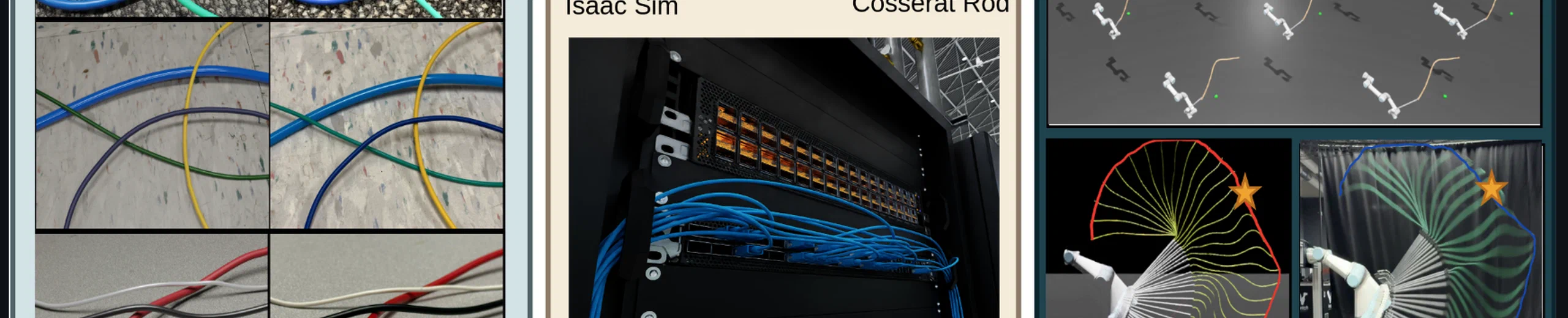
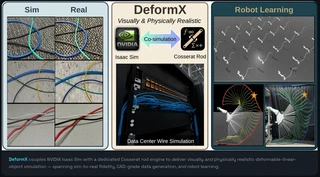
DeformX co-simulation framework for deformable linear objects.DeformX is a co-simulation framework for deformable linear objects such as wires, cables, and ropes. The project addresses a common gap in robotic manipulation simulation: visually realistic DLO assets are often procedural and physically shallow, while physics-oriented approaches can simplify slender elastic objects into rigid-link chains or generic soft bodies that miss bending, twisting, and shear behavior.
The framework integrates a dedicated Cosserat rod physics engine with NVIDIA Isaac Sim. The rod engine simulates DLO dynamics, self-collisions, and contact with arbitrary free-form meshes, while mesh skinning maps discrete rod deformation onto imported CAD models for high-fidelity visualization. This combination is intended to support both realistic visual rendering and principled physics in robot-learning pipelines.
The paper demonstrates DeformX across synthetic data generation and policy learning for DLO manipulation, then validates visual and physical fidelity against real-world experiments. Fine-tuning Segment Anything Model 3 on DeformX-generated data improves real-image wire segmentation by 10.2% mAP@75, and a rope-swinging policy trained entirely in DeformX reaches a mean target-hitting error of 6.6 cm on a UR5e manipulator in real-world trials.
Rope-swinging policy trained in DeformX executing target-hitting trials on a UR5e manipulator.
See the DeformX project website and the arXiv paper. The paper was accepted to IROS 2026.
Keywords: DeformX, deformable linear objects, DLO simulation, Cosserat rods, NVIDIA Isaac Sim, mesh skinning, robot manipulation, synthetic data generation, policy learning, sim-to-real transfer, SAM3, UR5e.
